Multiplatformní prohlížeč elektronických knih KOReader byl vydán ve verzi 2026.07 "Sailing Walrus". U PDF souborů s SMask lze vyčistit pozadí. Přibyla podpora Kobo v5 nebo základní podpora OPDS 2.0.
Společnost Valve sponzoruje a společnost Collabora portuje RADV (open source Vulkan ovladač pro AMD GPU z projektu Mesa) na Windows.
Starling (GitHub) je desktopové prostředí vytvořeno umělou inteligencí (s dohledem jednoho vývojáře během šesti měsíců).
Dne 30. června 2026 byla završena fyzická realizace projektu Czech National Quantum Communication Infrastructure (CZQCI), tedy České národní kvantové komunikační infrastruktury. Projekt byl realizován od 1. března 2023 a financován z Národního plánu obnovy částkou 121,6 milionu Kč. Cílem podpořeného projektu bylo vybudovat základy národní kvantové komunikační infrastruktury a ověřit možnosti jejího praktického využití. Mezi
… více »Město Šumperk se stalo terčem kybernetického útoku, chod úřadu je omezen. Zjišťuje se, jestli unikla nějaká data. Cílem hackerů byla městská datová síť. První útoky zaznamenali odborníci na informační technologie již v pondělí večer, závady se ale plně projevily až dnes ráno. Město událost nahlásilo Národnímu úřadu pro kybernetickou a informační bezpečnost (NUKIB).
Samba, svobodná implementace síťového protokolu SMB/CIFS, byla vydána ve verzích 4.24.5, 4.23.10 a 4.22.11. Řešeno je 6 zranitelností.
Přední technologické společnosti (Adobe, Cadence, Capital One, Cisco, Cloudera, Cloudflare, Cognition, CrowdStrike, Databricks, Dell Technologies, DoorDash, Elastic, HPE, Hugging Face, IBM, LangChain, Linux Foundation, Microsoft, NAVER, NetApp, Nous Research, NVIDIA, OpenClaw, Palantir, Palo Alto Networks, Red Hat, Reflection AI, Salesforce, SAP, ServiceNow, Siemens, SK Telecom, Snowflake, SpacexAI, Synopsys, Thinking
… více »Krabix.cz je online 3D konfigurátor krabiček pro 3D tisk s exportem do STL. Běží přímo v prohlížeči. Nic se neposílá na server.
Nadace Open Home Foundation spustila veřejnou preview verzi komunitní databáze zařízení pro Home Assistant. Má fungovat jako „Wikipedie pro chytrá zařízení".
Na stránce nového panelu Firefoxu přibudou nové widgety. Například denně aktualizována interaktivní křížovka.
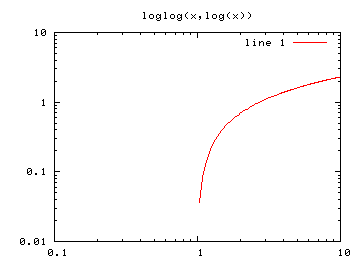
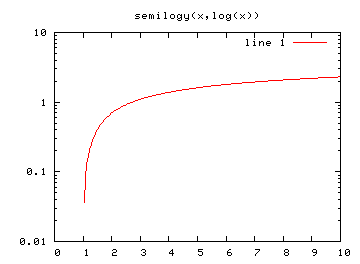
Příkaz plot popisovaný v minulém díle vykresluje grafy s lineárními osami. Funkce loglog, semilogx a semilogy mají stejné vstupní parametry, vykreslené grafy se však liší - jak již názvy napovídají - logaritmickým měřítkem os (buď oběma či pouze tou, která je uvedena v názvu):
>> x=linspace(0.2, 10, 200); >> plot(x, log(x)) >> loglog(x, log(x)) >> semilogx(x, log(x)) >> semilogy(x, log(x))
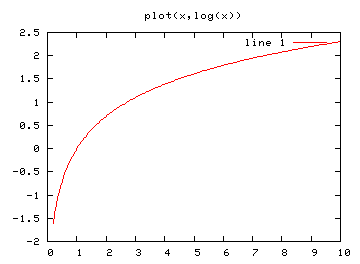
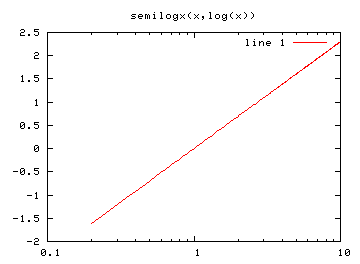
Popisky nad grafem, jak jsou vidět na obrázcích, byly (a budou) doplněny funkcí title, například jako:
title('semilogx(x,log(x))')
Veškeré další požadavky týkající se os grafů směřují k použití funkce axis. Ta je dalším příkladem funkce s různorodým počtem parametrů. Volána bez jakéhokoliv parametru nastavuje měřítko os automaticky. Jedním z přípustných a zároveň volitelných parametrů může být dvou či čtyřprvkový vektor čísel (pro třírozměrné grafy i šestiprvkový), kde první dvě čísla udávají kraje osy x a druhá dvě čísla kraje osy y:
>> axis([-1, 10, -0.8, 0.8]) >> plot(x,sin(x))
Dalšími parametry funkce mohou být řetězce s následujícími účinky na osy grafu:
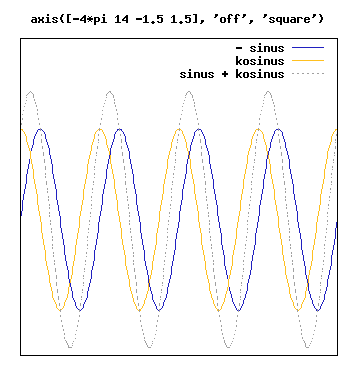
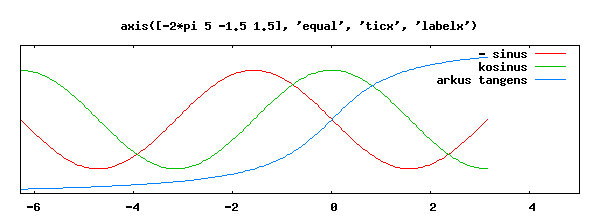
'square' - graf bude čtvercový bez ohledu na velikost výstupního zařízení'equal' - vzdálenosti na osách budou stejné bez ohledu na velikost výstupního zařízení'normal' - graf se přizpůsobí velikosti výstupního zařízení'on', 'off' - úplně zapne/vypne čárky a hodnoty'ticx', 'ticy' - zobrazí čárky pro zvolenou osu (a nezobrazí pro nezvolenou)'labelx', 'labely' - zobrazí hodnoty pro zvolenou osu (a nezobrazí pro nezvolenou)'nolabel' - schová hodnoty na obou osách'xy' - v horní části grafu jsou vyšší hodnoty'ij' - v horní části gradu jsou nižší hodnotyNuže několik příkladů (příkazy psány ve skriptech):
axis([-4*pi 4*pi -1.5 2], 'off', 'square'); x=linspace(-4*pi,4*pi,401); plot(x,sin(x),'8;sinus;',x,cos(x),'9;kosinus;',x, sin(x)+cos(x), '0;sinus + kosinus;')
axis([-2*pi 5 -1.5 1.5], 'equal', 'ticx', 'labelx'); x=linspace(-2*pi,pi,201); plot(x,-sin(x),';- sinus;',x,cos(x),';kosinus;',x, atan(x), ';arkus tangens;')
title('graf, kde je reverzní osa y a popisky os');
axis([-4*pi 4*pi -1.8 1.5], 'normal', 'ij', 'labely');
grid on; % vodící čáry
xlabel('toto je popisek osy x');
ylabel('toto je osa y');
x=linspace(-4*pi,4*pi,401);
plot(x, sin(x).*atan(x), '^m;sinus * arkus tangens;')
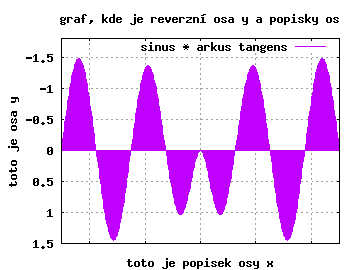
Poslední příklad také ukazuje, že vodicí čáry v grafu lze zapnout příkazem grid on a popisky jednotlivých os doplnit příkazy xlabel a ylabel.
Pro vykreslování některých speciálních typů rovinných grafů můžeme v Octave sáhnout po funkcích na jejich vykreslování zvlášť určených. Jejich kompletní popis je v nápovědě, zde uvedeme pouze stručnější souhrn s příklady. Na vykreslování sloupcových a schodovitých grafů existují funkce bar a stairs:
hold on x=linspace(-2,2,11); bar(x, x.^2) stairs(x, x.^2+1)
Všimněte si rozdílu, že sloupce jsou zobrazeny „na střed“ z vypočítané x-ové hodnoty, zatímco linie schodu začíná u spočítané hodnoty, jde vodorovně doprava a pokračuje nahoru či dolů k následující spočítané hodnotě - to vysvětluje, proč jsou v zobrazeném grafu schody posunuty kousek doprava oproti sloupcům.
Ani jedna těchto funkcí neumožňuje zadat třetí volitelný parametr pro definici stylu čáry. Lze však požadovat výsledek funkce jako dvouprvkový vektor souřadnic, které lze předat funkci plot s plnou parádou:
[barx, bary] = bar(x, x.^2) plot(barx, bary, 'm;sloupce;')
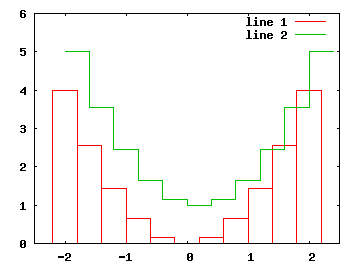
Jiným typem sloupcového grafu je histogram - funkce se jmenuje hist. Algoritmus se snaží hodnoty ze vstupního vektoru (první parametr funkce) rozdělit do několika přihrádek (druhý parametr), výšky sloupečků ve výsledném grafu pak odpovídají počtu prvků v jednotlivých přihrádkách:
hold on axis([0.5 5 0 4.5]) hist([1 1 2 3 3 3 4], 4) hist([1 1 2 3 3 3 4], 2)
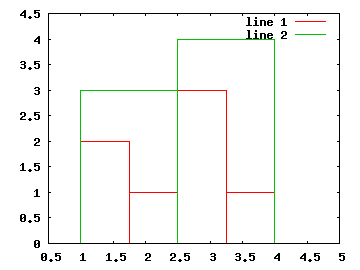
Čtyři červené sloupečky v grafu odpovídají čtyřem přihrádkám z prvního volání funkce hist, výsledek odpovídá tomu, že na vstupu jsou dvě jedničky, jedna dvojka, tři trojky a jedna čtyřka. V druhém případě dělíme jen do dvou přihrádek, proto zelené sloupečky sčítají jedničky s dvojkami a trojky se čtyřkami.
Histogram nám může být užitečný, když chceme vidět rozložení náhodných čísel z desetitisícového vzorku; čísla v příkladě sdružíme v pětisetinových intervalech:
>> hist(rand(1, 10000), 20, 100)
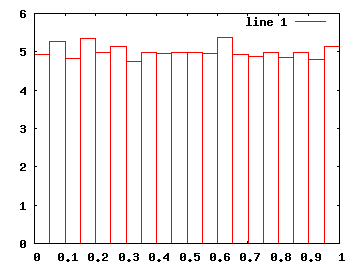
Třetí parametr slouží k normalizaci histogramu, jeho hodnota má ve výsledku být součtem hodnot jednotlivých sloupečků grafu. Zde zadaná hodnota 100 nám tedy zajistí, že hodnoty z osy y můžeme číst jako procenta.
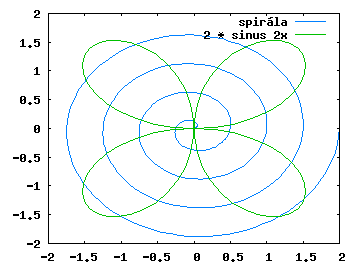
Máme-li vykreslit graf z polárních souřadnic (tj. známe úhel a vzdálenost od počátku), pomůže nám funkce polar:
hold on x=linspace(0,8*pi,361); y=linspace(0,2,361); polar(x,y, 'b;spirála;') polar(x, 2*sin(2*x), ';2 * sinus 2x;')
Nakonec se zmíníme o grafu s chybovými úsečkami. Základní funkce pro lineární souřadnice se jmenuje errorbar, existují však i další varianty pro logaritmická měřítka souřadnic. Nejjednodušší použití spočívá v poskytnutí třetího vektoru chyb ke každému vykreslovanému bodu - chyba se pak zobrazí jako rozptylová úsečka:
>> x=linspace(0,2*pi,41); >> chyby=rand(1,41)*0.3; >> errorbar(x,sin(x),chyby)
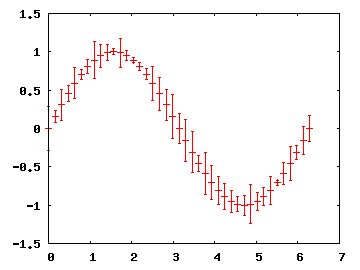
Chyba může být znázorněna také jako vodorovná úsečka či adekvátně široký sloupeček, v úvahu připadají i různé kombinace - více opět viz webový manuál.
Nástroje: Tisk bez diskuse
Tiskni
Sdílej:
![]()
![]()
![]()
![]()
![]()
![]()
 AbcLinuxu.cz
AbcLinuxu.cz ITBiz.cz
ITBiz.cz HDmag.cz
HDmag.cz AbcPráce.cz
AbcPráce.cz